业务咨询热线:
电话:13873397666
座机:0769-81818179
邮箱:kulkee-power@dgjiuqi.com

业务咨询热线:
电话:13873397666
座机:0769-81818179
邮箱:kulkee-power@dgjiuqi.com

东莞市玖琪实业有限公司
联系人:梁先生
手机:13873397666
电话:0769-81818179
传真:0769-81806179
地址:东莞市石排镇谷吓村孔屋工业区
邮编:523339
官方网站:http://www.dgjiuqi.com/
步进电机基础知识讲解 | |||||||||||||||||||||||||||||
1.步进电机的简介
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 2.步进电机的发展史
3.步进电机的特点
相对伺服电机来说,伺服电机内部通过安装旋转编码器实现了反馈控制,伺服电机可以达到的转矩要高于步进电机,但是价格相对也高,所以在转矩能满足的情况下,推荐用步进电机。步进电机配合驱动器使用,很多驱动器都支持细分功能,即实现很小的步进角,控制更精确。 4.步进电机的主要分类复读机电源适配器 步进电机在构造上有三种主要类型:反应式(VariableReluctance,VR)、永磁式(PermanentMagnet,PM)和混合式(HybridStepping,HS)。
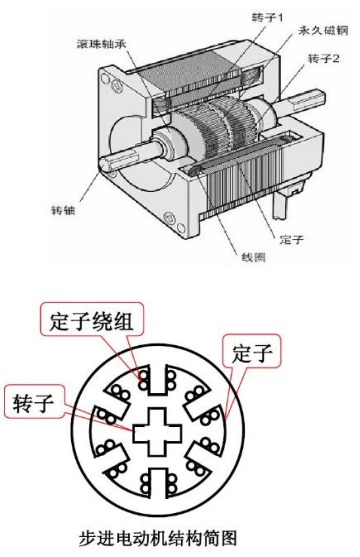
按定子上绕组来分,共有二相、三相和五相等系列。较受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。 5.步进电机的主要结构
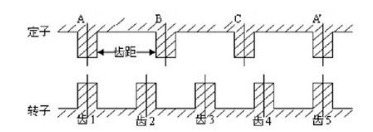
在定子磁极和转子上都开有齿分度相同的小齿,采用适当的齿数配合,当A相磁极的小齿与转子小齿一一对应时,B相磁极的小齿与转子小齿相互错开1/3齿距,C相则错开2/3齿距。
A相绕组与齿1、5一一对应,而此时B相绕组与齿2错开1/3齿距,而与齿3错开2/3齿距,C相绕组与齿3错开2/3齿距,而与齿4错开1/3齿距。 电机的位置和速度由绕组通电次数(脉冲数)和频率成一一对应关系。而方向由绕组通电的顺序决定。6.步进电机的选型 电机的步距角取决于负载精度的要求,将负载的较小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) 进电机一般在较大范围内调速使用、其功率是变化的,一般只用力矩来衡量,力矩与功率换算如下: P=Ω·MΩ=2π·n/60P=2πnM/60 7.步进电机与伺服电机的区别 步进电机  伺服电机  ·控制精度不同 步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸) ·低频特性不同 步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,所以其较高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。 ·矩频特性不同 步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,所以其较高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。 ·过载能力不同 步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。 ·运行性能不同 步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵转的现象。交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。 ·速度响应性能不同 步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。交流伺服系统的加速性能更好,可用于要求快速启停的控制场合。
文章转载自网络,如有侵权,请联系删除。 | |||||||||||||||||||||||||||||
| | 发布时间:2018.11.23 来源:电源适配器厂家 |
| 上一个:质量是一种习惯,质量就是符合要求 | 下一个:电源适配器的稳定性和控制环路补偿 |
东莞市玖琪实业有限公司专业生产:电源适配器、充电器、LED驱动电源、车载充电器、开关电源等....
版权所有:东莞市玖琪实业有限公司
联系人:梁先生 电话:13873397666
电话:0769-81818179 传真:0769-81806179 地址:东莞市石排镇谷吓村孔屋工业区 邮编:523339